Design Anchor Boxes for Object Detection
- Helper function
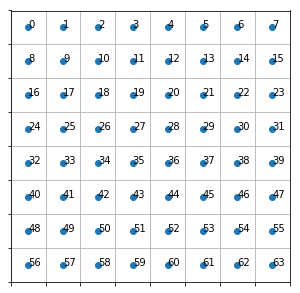
- Lets Print some images
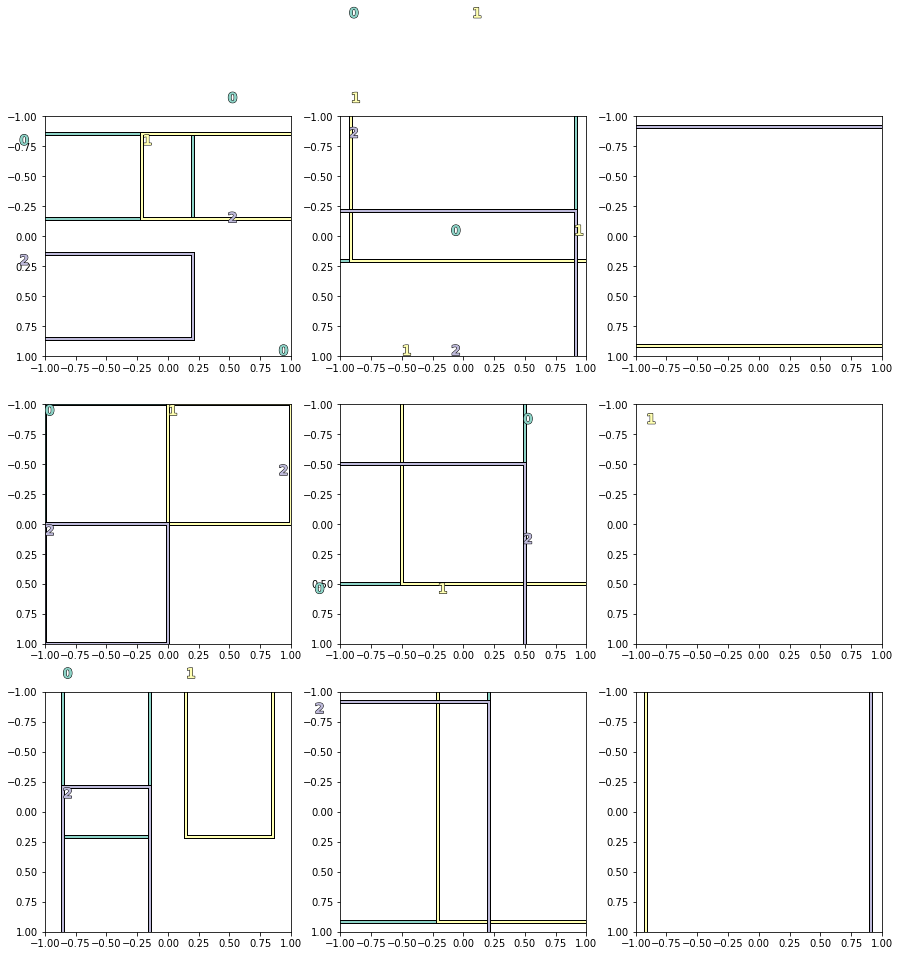
- Effect of sparse grid.
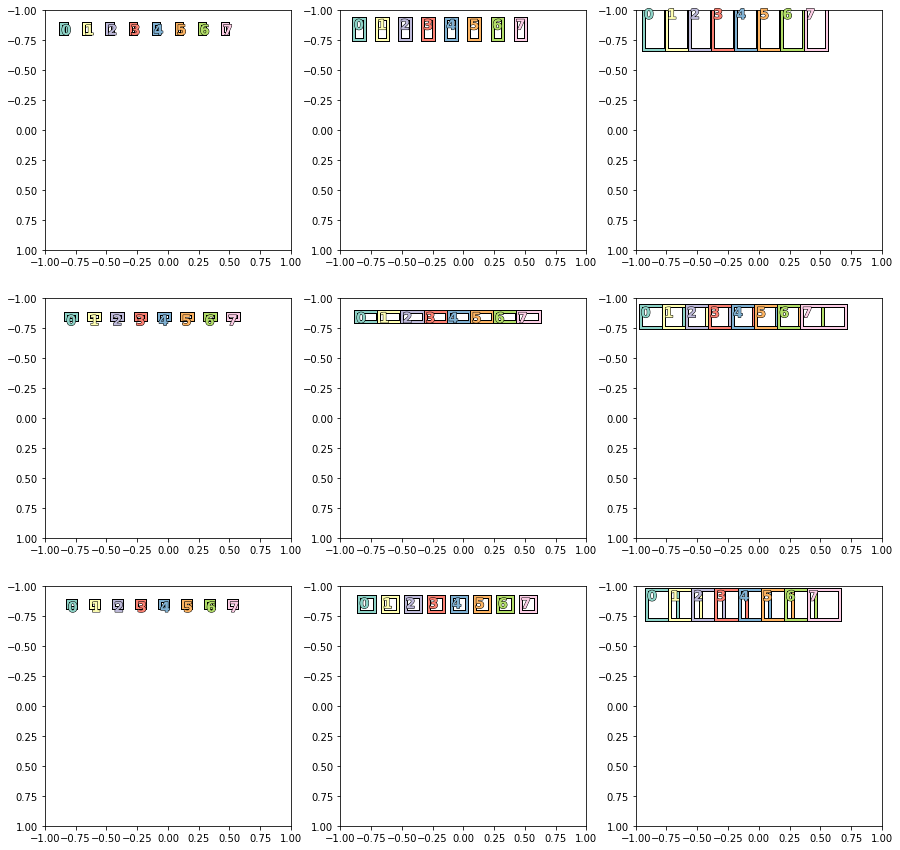
- Effect of dense grid.
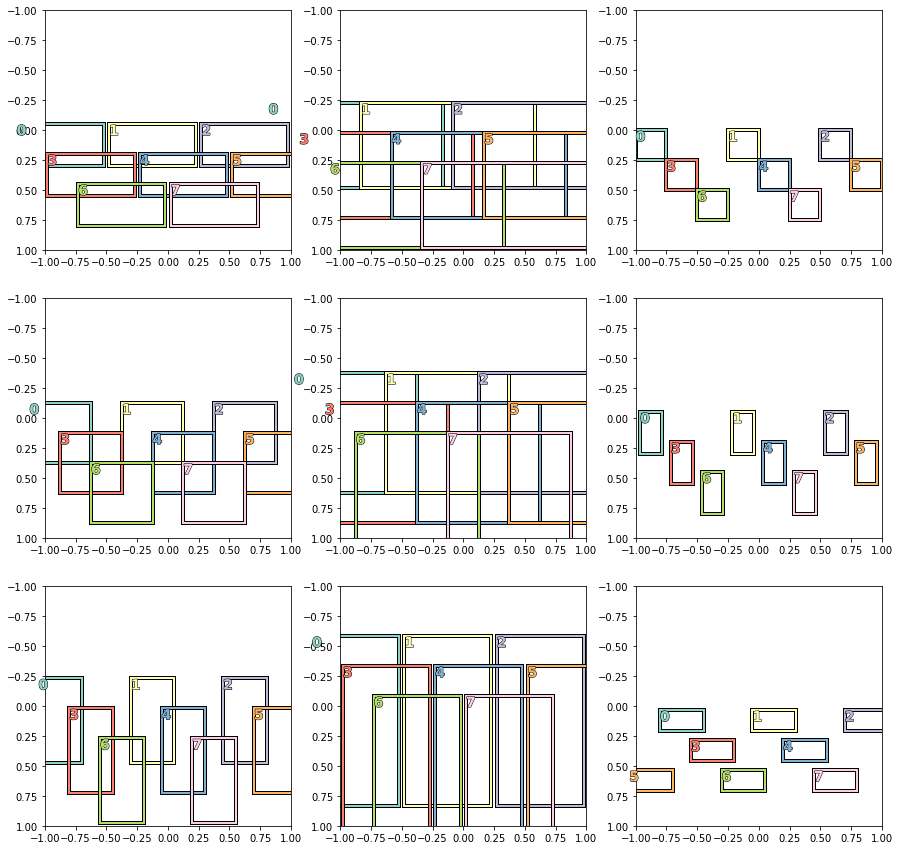
- Both sparse and dense grid
Understanding the anchor boxes in object detection is tricky. The grid size will determine the density of anchor boxes.
The density of anchor boxes is not related to image size. But in practice, we need to know if our anchor boxes are big enough to identify the objects.
We can use the following table as ref to determine box size.
| Image Size | Grid Size | Box size |
|---|---|---|
| 256, 256 | 32, 32 | 256/32 => 8 |
| 256, 256 | 16, 16 | 256/16 => 16 |
| 256, 256 | 8, 8 | 256/8 => 32 |
| 192, 192 | 32, 32 | 192/32 => 6 |
| 192, 192 | 16, 16 | 192/16 => 12 |
| 192, 192 | 8, 8 | 192/8 => 24 |
| 128, 128 | 32,32 | 128/32 => 4 |
| 128, 128 | 16,16 | 128/16 => 8 |
| 128, 128 | 8,8 | 128/8 => 16 |
Helper function
%load_ext autoreload
%autoreload 2
%matplotlib inline
import torch
import math
import matplotlib.cm as cmx
import matplotlib.colors as mcolors
from matplotlib.pyplot import figure
from cycler import cycler
from fastai import *
from fastai.vision import *
def get_cmap(N):
color_norm = mcolors.Normalize(vmin=0, vmax=N-1)
return cmx.ScalarMappable(norm=color_norm, cmap='Set3').to_rgba
num_color = 12
cmap = get_cmap(num_color)
color_list = [cmap(float(x)) for x in range(num_color)]
def draw_outline(o, lw):
o.set_path_effects([patheffects.Stroke(
linewidth=lw, foreground='black'), patheffects.Normal()])
def draw_rect(ax, b, color='white'):
patch = ax.add_patch(patches.Rectangle(b[:2], *b[-2:], fill=False, edgecolor=color, lw=2))
draw_outline(patch, 4)
def draw_text(ax, xy, txt, sz=14, color='white'):
text = ax.text(*xy, txt,
verticalalignment='top', color=color, fontsize=sz, weight='bold')
draw_outline(text, 1)
def create_grid(size):
"Create a grid of a given `size`."
H, W = size if is_tuple(size) else (size,size)
grid = FloatTensor(H, W, 2)
linear_points = torch.linspace(-1+1/W, 1-1/W, W) if W > 1 else tensor([0.])
grid[:, :, 1] = torch.ger(torch.ones(H), linear_points).expand_as(grid[:, :, 0])
linear_points = torch.linspace(-1+1/H, 1-1/H, H) if H > 1 else tensor([0.])
grid[:, :, 0] = torch.ger(linear_points, torch.ones(W)).expand_as(grid[:, :, 1])
return grid.view(-1,2)
def create_anchors(sizes, ratios, scales, flatten=True):
"Create anchor of `sizes`, `ratios` and `scales`."
aspects = [[[s*math.sqrt(r), s*math.sqrt(1/r)] for s in scales] for r in ratios]
aspects = torch.tensor(aspects).view(-1,2)
anchors = []
# import pdb; pdb.set_trace()
for h,w in sizes:
#4 here to have the anchors overlap.
sized_aspects = 4 * (aspects * torch.tensor([2/h,2/w])).unsqueeze(0)
base_grid = create_grid((h,w)).unsqueeze(1)
n,a = base_grid.size(0),aspects.size(0)
ancs = torch.cat([base_grid.expand(n,a,2), sized_aspects.expand(n,a,2)], 2)
anchors.append(ancs.view(h,w,a,4))
return torch.cat([anc.view(-1,4) for anc in anchors],0) if flatten else anchors
Lets Print some images
We need some of the helper function to create a bounding box with some representation.
Combination of scale & ratio gives the different size of boxes in an image.
>>> ratios = [1/2,1,2]
>>> scales = [.25, .5, 1]
>>> [[[s*math.sqrt(r), s*math.sqrt(1/r)] for s in scales] for r in ratios]
[[[0.1767766952966369, 0.3535533905932738],
[0.3535533905932738, 0.7071067811865476],
[0.7071067811865476, 1.4142135623730951]],
[[0.25, 0.25], [0.5, 0.5], [1.0, 1.0]],
[[0.3535533905932738, 0.1767766952966369],
[0.7071067811865476, 0.3535533905932738],
[1.4142135623730951, 0.7071067811865476]]]
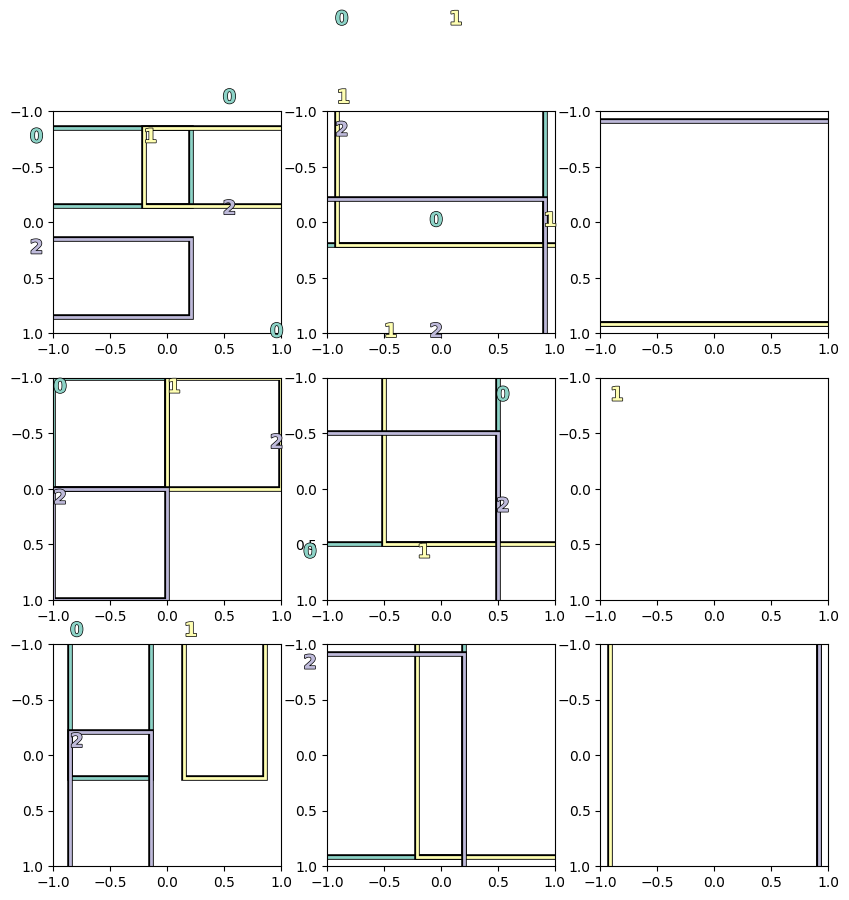
size divides the image and creates the grid.
size decides how far the anchor box is placed in the image.
See with one size of (2,2) how boxes are placed.
Within each grid, all the 9 boxes will be placed.
def show_boxes(boxes, ax=None):
"Show the `boxes` (size by 4)"
# _,ax = plt.subplots(1,1, figsize=(5,5))
ax.set_xlim(-1,1)
ax.set_ylim(1,-1)
for i, bbox in enumerate(boxes):
bb = bbox.numpy()
rect = [bb[1]-bb[3]/2, bb[0]-bb[2]/2, bb[3], bb[2]]
draw_rect(ax, rect, color=color_list[i%num_color])
draw_text(ax, [bb[1]-bb[3]/2,bb[0]-bb[2]/2], str(i), color=color_list[i%num_color])
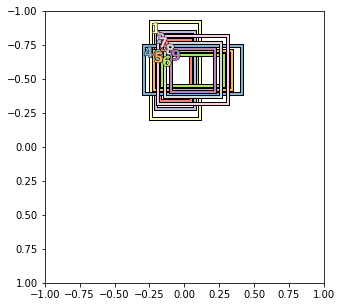
Effect of sparse grid.
ratios = [1/2,1,2]
scales = [.25, .5, 1]
sizes = [(2,2)]
sizes.reverse() #Predictions come in the order of the smallest feature map to the biggest
anchors = create_anchors(sizes, ratios, scales)
print(len(anchors))
box = 9
# figure(num=None, figsize=(1, 1), dpi=80, facecolor='w', edgecolor='k')
_,axs = plt.subplots(3,3, figsize=(15,15))
axs = axs.reshape(-1,9).squeeze()
for b in range(box):
show_boxes([anchors[i] for i in range(0+b,27+b,9) ] ,axs[b])
36
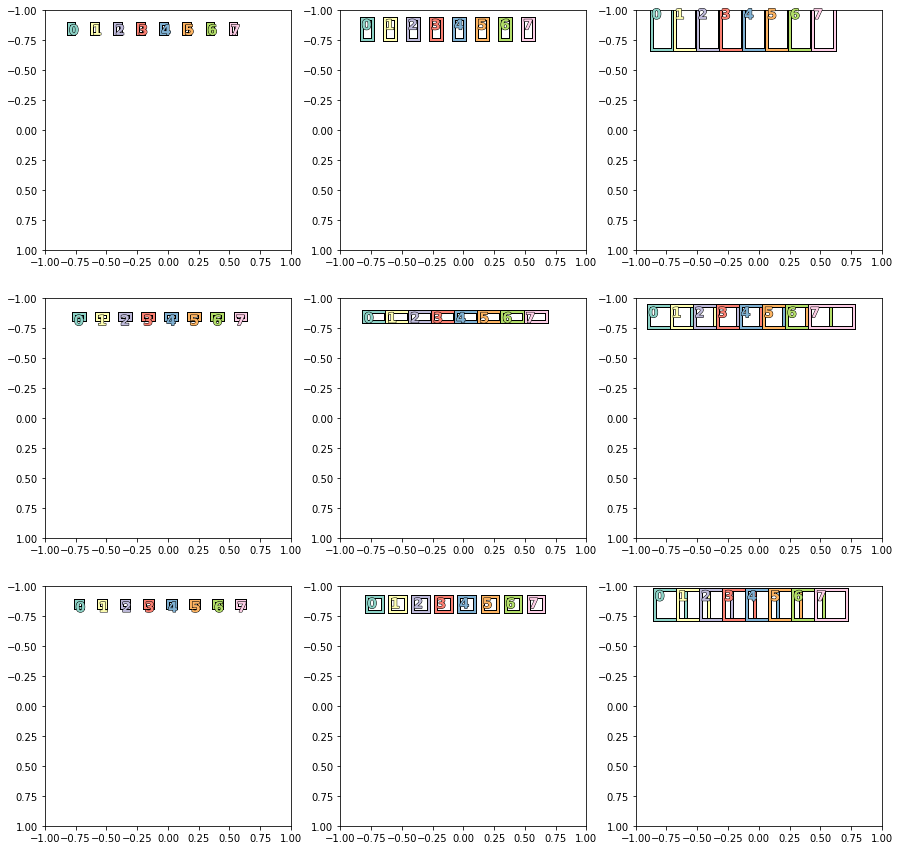
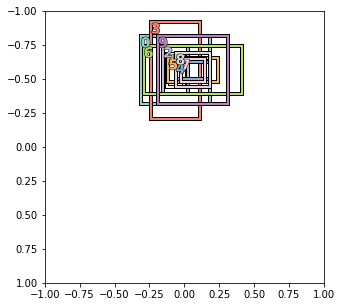
Effect of dense grid.
If size = 32,32, we will get more dense grid. A dense grid will help to detect smaller objects.
We are skipping 27 anchors before plotting next anchor.
ratios = [1/2,1,2]
scales = [.25, .5, 1]
sizes = [(32,32)]
sizes.reverse() #Predictions come in the order of the smallest feature map to the biggest
anchors = create_anchors(sizes, ratios, scales)
ax=None
box = 9
# figure(num=None, figsize=(1, 1), dpi=80, facecolor='w', edgecolor='k')
_,axs = plt.subplots(3,3, figsize=(15,15))
axs = axs.reshape(-1,9).squeeze()
for b in range(box):
show_boxes([anchors[i] for i in range(600+b,800+b,27) ] ,axs[b])
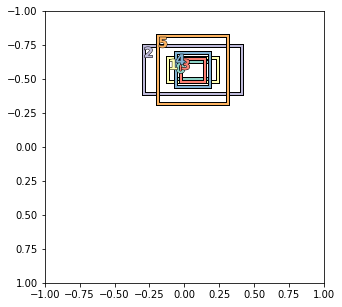
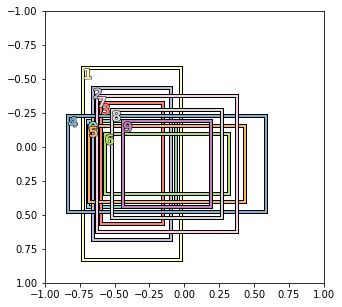
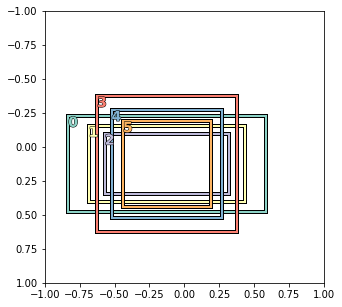
Both sparse and dense grid
If we have 5 different grid size then depending on where we look, we will get different boxes.
Here we are looking at the end of anchors.
ratios = [1/2,1,2]
scales = [.25, .5, 1]
sizes = [(2**i,2**i) for i in range(1,6)]
sizes.reverse() #Predictions come in the order of the smallest feature map to the biggest
anchors = create_anchors(sizes, ratios, scales)
print(len(anchors))
box = 9
_,axs = plt.subplots(3,3, figsize=(15,15))
axs = axs.reshape(-1,9).squeeze()
for b in range(box):
show_boxes([anchors[i] for i in range(11809+b,12000+b,27) ] ,axs[b])
12276
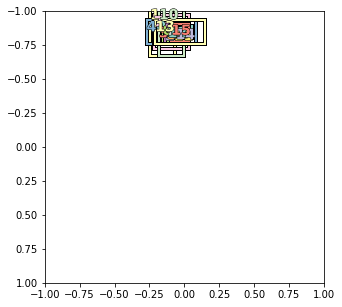
Here we are looking at the start of anchors.
box = 9
_,axs = plt.subplots(3,3, figsize=(15,15))
axs = axs.reshape(-1,9).squeeze()
for b in range(box):
show_boxes([anchors[i] for i in range(609+b,800+b,27) ] ,axs[b])
ratios = [1/2,1,2]
scales = [.25, .5, 1]
sizes = [(2,2)]
sizes.reverse() #Predictions come in the order of the smallest feature map to the biggest
anchors = create_anchors(sizes, ratios, scales)
print(len(anchors))
box = 9
# figure(num=None, figsize=(1, 1), dpi=80, facecolor='w', edgecolor='k')
fig,axs = plt.subplots(3,3, squeeze=False, figsize=(10,10), dpi=100)
print(fig.get_size_inches()*fig.dpi)
axs = axs.reshape(-1,9).squeeze()
for b in range(box):
show_boxes([anchors[i] for i in range(0+b,27+b,9) ] ,axs[b])
36
[1000. 1000.]
def show_boxes(boxes, ax=None):
"Show the `boxes` (size by 4)"
if not ax:
_, ax = plt.subplots(1,1, figsize=(5,5))
ax.set_xlim(-1,1)
ax.set_ylim(1,-1)
for i, bbox in enumerate(boxes):
bb = bbox.numpy()
rect = [bb[1]-bb[3]/2, bb[0]-bb[2]/2, bb[3], bb[2]]
draw_rect(ax, rect, color=color_list[i%num_color])
draw_text(ax, [bb[1]-bb[3]/2,bb[0]-bb[2]/2], str(i), color=color_list[i%num_color])
Anchors going out of boundary are discarded. These anchors boxes are going out of the frame are generally discarded in object detection. But check again.
ratios = [1/2,1,2]
scales = [1,2**(-1/3), 2**(-2/3)]
sizes = [(2**i,2**i) for i in range(5)]
sizes.reverse() #Predictions come in the order of the smallest feature map to the biggest
# sizes = [(2**i,2**i) for i in range(2)]
anchors = create_anchors(sizes, ratios, scales)
show_boxes(anchors[:5])
show_boxes(anchors[120:140])
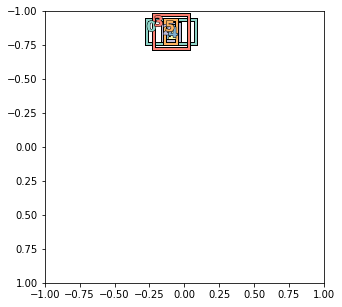
First few 100 boxes are just being discarded. Anchors between this range fits in the boundary.
Anchors from around 500 fits in the frame.
show_boxes(anchors[500:510])
scale used in the code, gives better bounding box
ratios = [1/2,1,2]
scales = [0.35, 0.5, 1]
sizes = [(2**i,2**i) for i in range(5)]
sizes.reverse() #Predictions come in the order of the smallest feature map to the biggest
anchors = create_anchors(sizes, ratios, scales)
show_boxes(anchors[500:510])
show_boxes(anchors[504:510])
If the size is not reversed. We look at bigger bounding box first.
ratios = [1/2,1,2]
scales = [1,2**(-1/3), 2**(-2/3)]
sizes = [(2**i,2**i) for i in range(5)]
# sizes.reverse() #Predictions come in the order of the smallest feature map to the biggest
anchors = create_anchors(sizes, ratios, scales)
show_boxes(anchors[500:510])
show_boxes(anchors[504:510])
size is changed to 2 to 32.
scale is diff from one used in pascal.ipynb in fastai.
ratios = [1/2,1,2]
scales = [.25, .5, 1,]
sizes = [(2**i,2**i) for i in range(1,6)]
sizes.reverse() #Predictions come in the order of the smallest feature map to the biggest
anchors = create_anchors(sizes, ratios, scales)
show_boxes(anchors[700:716])
show_boxes(anchors[704:710])
sizes
[(32, 32), (16, 16), (8, 8), (4, 4), (2, 2)]